
Principal Investigator:
James CoughlanThe ability to navigate safely and confidently is a fundamental requirement for independent travel to many settings such as work, school, shopping, transit, and healthcare. Navigation is particularly challenging for people with visual impairments, who have limited ability to see signs, landmarks, or maps posted in the environment. While a variety of GPS-based wayfinding aids are available for this population, the lack of GPS availability indoors has meant that very few alternative sources of wayfinding information are available in this setting.
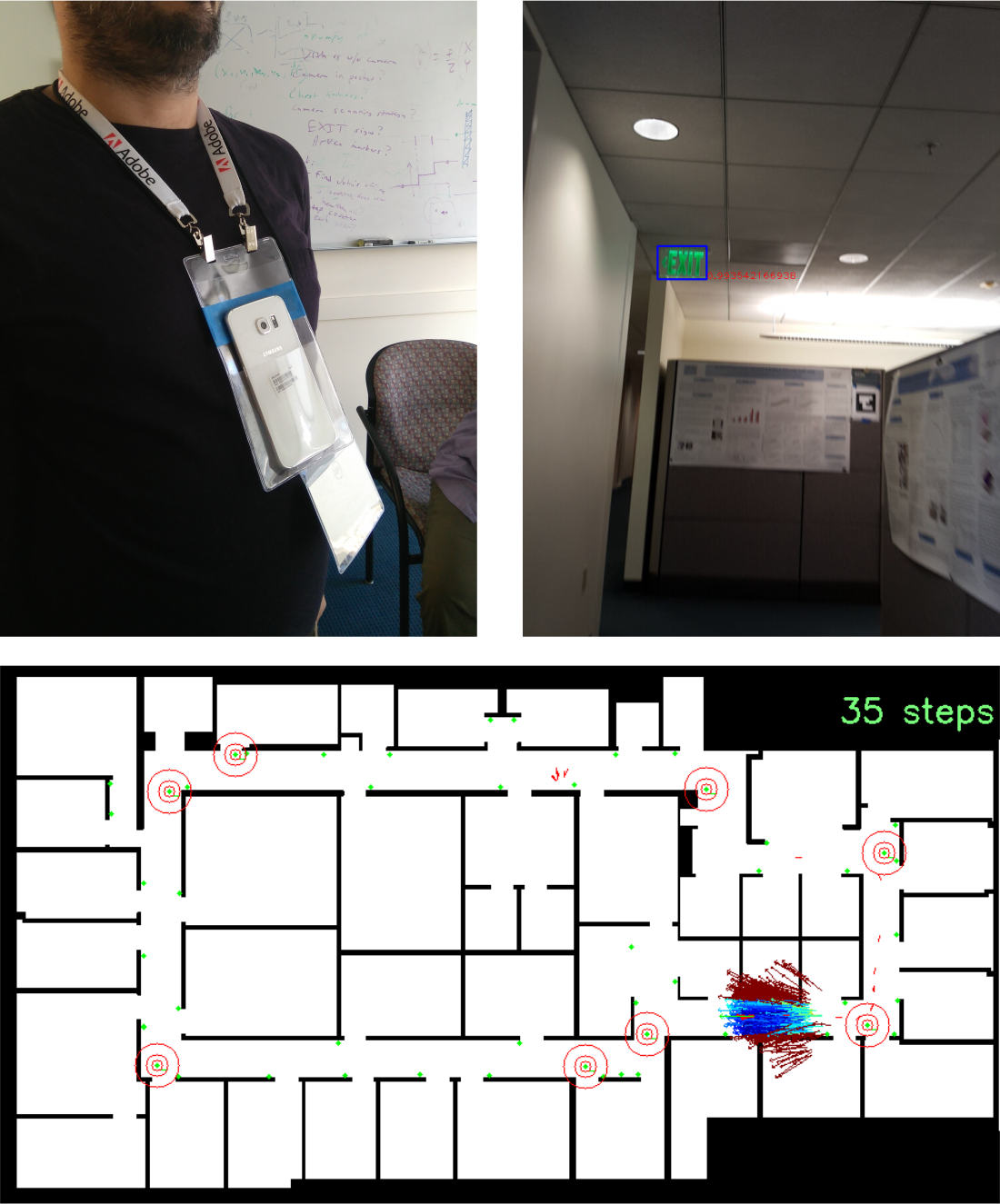
We are developing a smartphone-based indoor navigation assistance system that uses computer vision to estimate the user’s location in an indoor environment and guide him/her to a desired destination. The advantages of our approach are (a) it runs on a standard smartphone and requires no new physical infrastructure, just a digital 2D map of the indoor environment that includes the locations of signs in it; and (b) it allows the user to walk freely without having to actively search for signs with the smartphone (which is challenging for people with severe visual impairments).
New: see a video demonstration of our navigation app in action, which issues turn-by-turn directions to guide the user to their desired destination.
Primary funding for this project is from a grant from NIH/NEI (R01EY029033).
Publications

Projects
Coordination of Eye and Head Movements in Central Field Loss
Labs
 Coughlan LabThe goal of our laboratory is to develop and test assistive technology for blind and visually impaired persons that is enabled by computer vision and other sensor technologies.
Coughlan LabThe goal of our laboratory is to develop and test assistive technology for blind and visually impaired persons that is enabled by computer vision and other sensor technologies.
Centers
 Rehabilitation Engineering Research CenterThe Center's research goal is to develop and apply new scientific knowledge and practical, cost-effective devices to better understand and address the real-world problems of blind, visually impaired, and deaf-blind...
Rehabilitation Engineering Research CenterThe Center's research goal is to develop and apply new scientific knowledge and practical, cost-effective devices to better understand and address the real-world problems of blind, visually impaired, and deaf-blind...
People





Fundings
News
 SKERI Receives Rehabilitation Engineering Research Center (RERC) grant on Blindness and Low VisionSmith-Kettlewell is proud to announce the newly awarded Rehabilitation Engineering Research Center (RERC) grant on Blindness and Low Vision. This is a five-year grant from the National Institute on Disability,...
SKERI Receives Rehabilitation Engineering Research Center (RERC) grant on Blindness and Low VisionSmith-Kettlewell is proud to announce the newly awarded Rehabilitation Engineering Research Center (RERC) grant on Blindness and Low Vision. This is a five-year grant from the National Institute on Disability,...
Get Involved
If you are interested in vision science or want to learn more about low vision and blindness, there are many opportunities to get involved at The Smith-Kettlewell Eye Research Institute.